

Question Number 47639 by azharkhan250963@gmail.com last updated on 12/Nov/18
$$\boldsymbol{\mathrm{derivation}}\:\boldsymbol{\mathrm{or}}\:\boldsymbol{\mathrm{proof}}\:\boldsymbol{\mathrm{or}}\:\boldsymbol{\mathrm{full}}\:\boldsymbol{\mathrm{explanation}} \\ $$$$\boldsymbol{\mathrm{of}}\:\boldsymbol{\mathrm{R}}=\left(\boldsymbol{\mathrm{R}}_{\mathrm{1}} ^{\mathrm{2}} +\boldsymbol{\mathrm{R}}_{\mathrm{2}} ^{\mathrm{2}} +\mathrm{2R}_{\mathrm{1}} .\mathrm{R}_{\mathrm{2}} \mathrm{cos}\theta\right)^{\mathrm{1}/\mathrm{2}} \\ $$
Answered by tanmay.chaudhury50@gmail.com last updated on 12/Nov/18
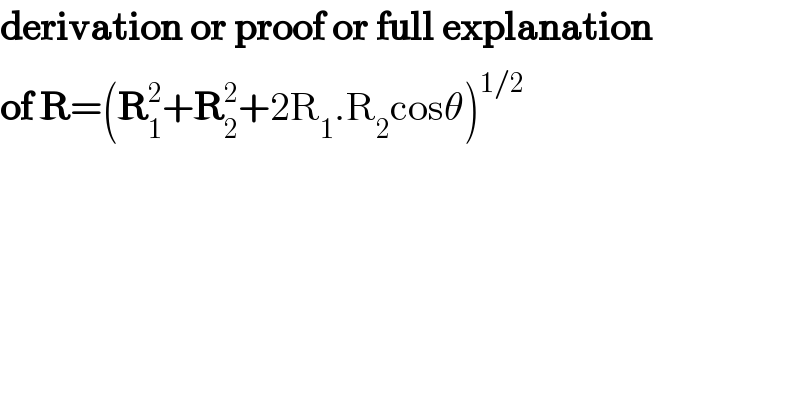
![R^→ =R_1 ^→ +R_2 ^→ R^→ .R^→ =(R_1 ^→ +R_2 ^→ ).(R_1 ^→ +R_2 ^→ ).....(1) [now A^→ .B^→ =∣A^→ ∣∣B^→ ∣cosα=abcosα ∣A^→ ∣=a ∣B^→ ∣=b where α is angle between A^→ and B^→ again P^→ .P^→ =∣P^→ ∣∣P^→ ∣cos0^o =∣P^→ ∣^2 =p^2 ] so from 1 we get R^→ .R^→ =R_1 ^→ .R_1 ^→ +2R_1 ^→ .R_2 ^→ +R_2 ^→ .R_2 ^→ R^2 =R_1 ^2 +R_2 ^2 +2R_1 R_2 cosθ R=(√(R_1 ^2 +R_2 ^2 +2R_1 R_2 cosθ)) where ∣R^→ ∣=R ∣R_1 ^→ ∣=R_1 ∣R_2 ^→ ∣=R_2](Q47643.png)
$$\overset{\rightarrow} {{R}}=\overset{\rightarrow} {{R}}_{\mathrm{1}} +\overset{\rightarrow} {{R}}_{\mathrm{2}} \\ $$$$\overset{\rightarrow} {{R}}.\overset{\rightarrow} {{R}}=\left(\overset{\rightarrow} {{R}}_{\mathrm{1}} +\overset{\rightarrow} {{R}}_{\mathrm{2}} \right).\left(\overset{\rightarrow} {{R}}_{\mathrm{1}} +\overset{\rightarrow} {{R}}_{\mathrm{2}} \right).....\left(\mathrm{1}\right) \\ $$$$\left[{now}\:\overset{\rightarrow} {{A}}.\overset{\rightarrow} {{B}}=\mid\overset{\rightarrow} {{A}}\mid\mid\overset{\rightarrow} {{B}}\mid{cos}\alpha={abcos}\alpha\right. \\ $$$$\mid\overset{\rightarrow} {{A}}\mid={a}\:\:\:\:\mid\overset{\rightarrow} {{B}}\mid={b}\:\:\: \\ $$$${where}\:\alpha\:{is}\:{angle}\:{between}\:\overset{\rightarrow} {{A}}\:{and}\:\overset{\rightarrow} {{B}} \\ $$$$\left.{again}\:\overset{\rightarrow} {{P}}.\overset{\rightarrow} {{P}}=\mid\overset{\rightarrow} {{P}}\mid\mid\overset{\rightarrow} {{P}}\mid{cos}\mathrm{0}^{{o}} =\mid\overset{\rightarrow} {{P}}\mid^{\mathrm{2}} ={p}^{\mathrm{2}} \:\:\:\right] \\ $$$$ \\ $$$${so}\:{from}\:\mathrm{1}\:{we}\:{get} \\ $$$$\overset{\rightarrow} {{R}}.\overset{\rightarrow} {{R}}=\overset{\rightarrow} {{R}}_{\mathrm{1}} .\overset{\rightarrow} {{R}}_{\mathrm{1}} \:+\mathrm{2}\overset{\rightarrow} {{R}}_{\mathrm{1}} .\overset{\rightarrow} {{R}}_{\mathrm{2}} +\overset{\rightarrow} {{R}}_{\mathrm{2}} .\overset{\rightarrow} {{R}}_{\mathrm{2}} \\ $$$${R}^{\mathrm{2}} ={R}_{\mathrm{1}} ^{\mathrm{2}} +{R}_{\mathrm{2}} ^{\mathrm{2}} +\mathrm{2}{R}_{\mathrm{1}} {R}_{\mathrm{2}} {cos}\theta \\ $$$${R}=\sqrt{{R}_{\mathrm{1}} ^{\mathrm{2}} +{R}_{\mathrm{2}} ^{\mathrm{2}} +\mathrm{2}{R}_{\mathrm{1}} {R}_{\mathrm{2}} {cos}\theta}\:\: \\ $$$${where}\:\:\:\mid\overset{\rightarrow} {{R}}\mid={R}\:\:\:\:\mid\overset{\rightarrow} {{R}}_{\mathrm{1}} \mid={R}_{\mathrm{1}} \:\:\:\:\mid\overset{\rightarrow} {{R}}_{\mathrm{2}} \mid={R}_{\mathrm{2}} \:\:\: \\ $$$$ \\ $$$$ \\ $$