
Question Number 58171 by pierre last updated on 19/Apr/19
$$\mathrm{a}\:\mathrm{particle}\:\mathrm{of}\:\mathrm{mass}\:\mathrm{m}\:\mathrm{kg}\:\mathrm{is}\:\mathrm{moving}\:\mathrm{along} \\ $$$$\mathrm{a}\:\mathrm{smooth}\:\mathrm{wire}\:\mathrm{that}\:\mathrm{is}\:\mathrm{fixed}\:\mathrm{in}\:\mathrm{a}\:\mathrm{plane}. \\ $$$$\mathrm{The}\:\mathrm{polar}\:\mathrm{equation}\:\mathrm{of}\:\mathrm{the}\:\mathrm{wire}\:\:\mathrm{is}\: \\ $$$$\mathrm{r}\:=\:\mathrm{ae}^{\mathrm{3}\theta} .\:\mathrm{The}\:\mathrm{particle}\:\mathrm{moves}\:\mathrm{with}\:\mathrm{a}\:\mathrm{cons} \\ $$$$\mathrm{tant}\:\mathrm{velocity}\:\mathrm{of}\:\mathrm{6}.\:\mathrm{At}\:\mathrm{time}\:\:\mathrm{t}\:=\:\mathrm{0}\:,\:\mathrm{the}\:\mathrm{par} \\ $$$$\mathrm{ticle}\:\mathrm{is}\:\mathrm{at}\:\mathrm{the}\:\mathrm{point}\:\mathrm{with}\:\mathrm{polar}\:\mathrm{equation} \\ $$$$\left(\mathrm{a},\theta\right) \\ $$$$\left.\mathrm{a}\right)\mathrm{Find}\:\mathrm{the}\:\mathrm{transverse}\:\mathrm{and}\:\mathrm{radial}\:\mathrm{compo} \\ $$$$\mathrm{nents}\:\mathrm{of}\:\mathrm{the}\:\mathrm{acceleration}\:\mathrm{of}\:\mathrm{the}\:\mathrm{particle} \\ $$$$\mathrm{in}\:\mathrm{terms}\:\mathrm{of}\:\mathrm{a}\:\mathrm{and}\:\mathrm{t}. \\ $$$$\left.\mathrm{b}\right)\:\mathrm{the}\:\mathrm{resultant}\:\mathrm{force}\:\mathrm{on}\:\mathrm{the}\:\mathrm{particle}\:\mathrm{is} \\ $$$$\mathrm{F}.\:\mathrm{Show}\:\mathrm{that}\:\mathrm{the}\:\mathrm{magnitude}\:\mathrm{of}\:\mathrm{F}\:\mathrm{at}\:\mathrm{time} \\ $$$$\mathrm{t}\:\mathrm{is}\:\mathrm{360mae}^{\mathrm{18t}} \\ $$
Answered by tanmay last updated on 19/Apr/19
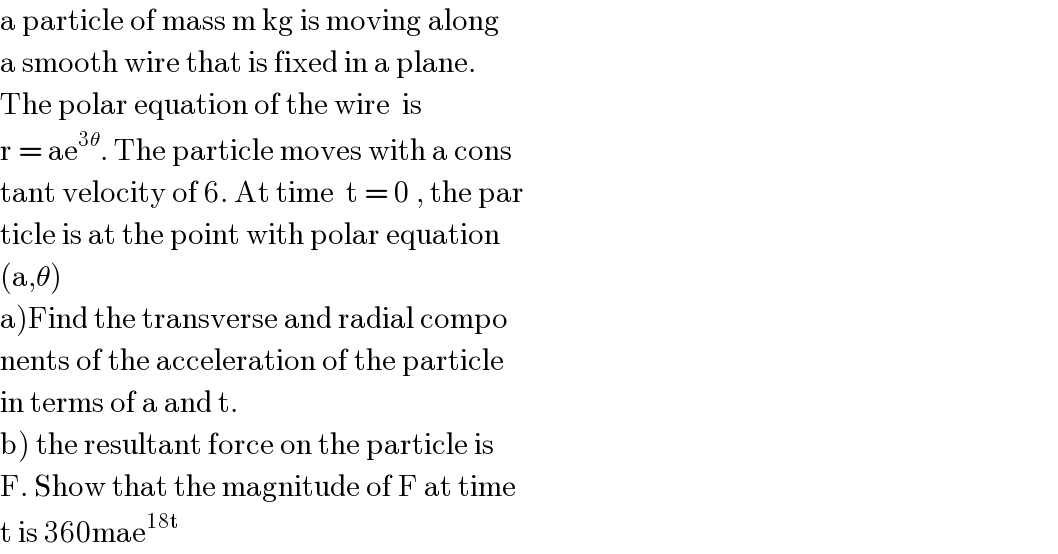
![a)a_r ^→ =r^(..) −r(θ^(..) )^2 →radial accelaration a_T ^→ =2r^. θ^. +rθ^(..) →transvers accelaration now r^. =(dr/dt)=(d/dt)(ae^(3θ) )=a×e^(3θ) ×3=3ae^(3θ) ×(dθ/dt) r^. =3ae^(3θ) ×θ^. r^(..) =(d/dt)(r^. )=(d/dt)(3ae^(3θ) ×θ^. ) r^(..) =3a[e^(3θ) ×θ^(..) +e^(3θ) ×3×(dθ/dt)×θ^. ] r^(..) =3ae^(3θ) θ^(..) +9ae^(3θ) (θ^(..) )^2 →3rθ^(..) +9r(θ^(..) )^2 so a_r ^→ =r^(..) −r(^ θ^(..) )^2 a_r ^→ =3rθ^(..) +9r(θ^(..) )^2 −r(θ^(..) )^2 →3rθ^(..) +8r(θ^(..) )^2 ←radial accelaration a_T ^→ =2r^. θ^. +rθ^(..) a_T ^→ =2(3ae^(3θ) θ^. )θ^. +(ae^(3θ) )θ^(..) a_T ^→ =6ae^(3θ) θ^. +ae^(3θ) θ^(..) a_T ^→ =6rθ^. +r^ θ^(..) →transverse acc pls check...](https://www.tinkutara.com/question/Q58194.png)
$$\left.{a}\right)\overset{\rightarrow} {{a}}_{{r}} =\overset{..} {{r}}−{r}\left(\overset{..} {\theta}\right)^{\mathrm{2}} \rightarrow{radial}\:{accelaration} \\ $$$$\:\:\:\:\:\:\overset{\rightarrow} {{a}}_{{T}} =\mathrm{2}\overset{.} {{r}}\overset{.} {\theta}+{r}\overset{..} {\theta}\rightarrow{transvers}\:{accelaration} \\ $$$${now}\:\overset{.} {{r}}=\frac{{dr}}{{dt}}=\frac{{d}}{{dt}}\left({ae}^{\mathrm{3}\theta} \right)={a}×{e}^{\mathrm{3}\theta} ×\mathrm{3}=\mathrm{3}{ae}^{\mathrm{3}\theta} ×\frac{{d}\theta}{{dt}} \\ $$$$\overset{.} {{r}}=\mathrm{3}{ae}^{\mathrm{3}\theta} ×\overset{.} {\theta} \\ $$$$\overset{..} {{r}}=\frac{{d}}{{dt}}\left(\overset{.} {{r}}\right)=\frac{{d}}{{dt}}\left(\mathrm{3}{ae}^{\mathrm{3}\theta} ×\overset{.} {\theta}\right) \\ $$$$\overset{..} {{r}}=\mathrm{3}{a}\left[{e}^{\mathrm{3}\theta} ×\overset{..} {\theta}+{e}^{\mathrm{3}\theta} ×\mathrm{3}×\frac{{d}\theta}{{dt}}×\overset{.} {\theta}\right] \\ $$$$\overset{..} {{r}}=\mathrm{3}{ae}^{\mathrm{3}\theta} \overset{..} {\theta}+\mathrm{9}{ae}^{\mathrm{3}\theta} \left(\overset{..} {\theta}\right)^{\mathrm{2}} \rightarrow\mathrm{3}{r}\overset{..} {\theta}+\mathrm{9}{r}\left(\overset{..} {\theta}\right)^{\mathrm{2}} \\ $$$${so}\:\overset{\rightarrow} {{a}}_{{r}} =\overset{..} {{r}}−{r}\overset{} {\left(}\overset{..} {\theta}\right)^{\mathrm{2}} \\ $$$$\overset{\rightarrow} {{a}}_{{r}} =\mathrm{3}{r}\overset{..} {\theta}+\mathrm{9}{r}\left(\overset{..} {\theta}\right)^{\mathrm{2}} −{r}\left(\overset{..} {\theta}\right)^{\mathrm{2}} \rightarrow\mathrm{3}\boldsymbol{{r}}\overset{..} {\theta}+\mathrm{8}{r}\left(\overset{..} {\theta}\right)^{\mathrm{2}} \leftarrow{radial}\:{accelaration} \\ $$$$\overset{\rightarrow} {{a}}_{{T}} =\mathrm{2}\overset{.} {{r}}\overset{.} {\theta}+{r}\overset{..} {\theta} \\ $$$$\overset{\rightarrow} {{a}}_{{T}} =\mathrm{2}\left(\mathrm{3}{ae}^{\mathrm{3}\theta} \overset{.} {\theta}\right)\overset{.} {\theta}+\left({ae}^{\mathrm{3}\theta} \right)\overset{..} {\theta} \\ $$$$\overset{\rightarrow} {{a}}_{{T}} =\mathrm{6}{ae}^{\mathrm{3}\theta} \overset{.} {\theta}+{ae}^{\mathrm{3}\theta} \overset{..} {\theta} \\ $$$$\overset{\rightarrow} {{a}}_{{T}} =\mathrm{6}{r}\overset{.} {\theta}+\overset{} {{r}}\overset{..} {\theta}\rightarrow{transverse}\:{acc} \\ $$$$\boldsymbol{{pls}}\:\boldsymbol{{check}}… \\ $$